Percobaan 6
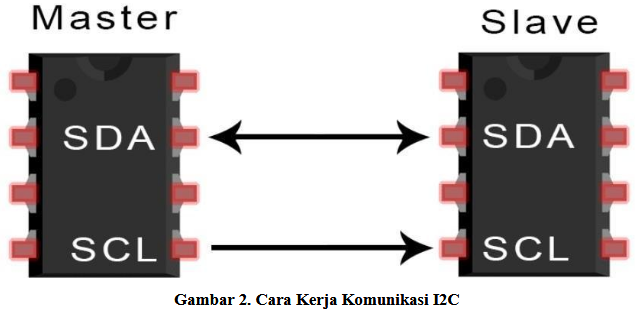
I2C (Pico-LCD)
1. Prosedur [Kembali]
- Rangkai semua komponen
- Buat program di aplikasi Thonny
- Jalankan program dan inputkan program
- Jalankan rangkaian
2. Hardware dan Diagram Blok [Kembali]
- 1. Mikrokontroler STM32F103C8
 2. Mikrokontroler Raspberry Pi Pico
2. Mikrokontroler Raspberry Pi Pico 3. Development Board
3. Development Board 4. LCD OLED
4. LCD OLED 5. Potensiometer
5. Potensiometer
- 6. Motor Servo




3. Rangkaian Simulasi dan Prinsip Kerja [Kembali]

Prinsip Kerja :
Rangkaian ini dirancang untuk mengendalikan sudut putar motor servo menggunakan input dari sebuah potensiometer, serta menampilkan nilai sudut atau nilai ADC hasil pembacaan potensiometer pada modul LCD 16x2. Sistem dikendalikan oleh mikrokontroler Raspberry Pi Pico.
Potensiometer berfungsi sebagai sumber input analog yang menghasilkan tegangan bervariasi antara 0 hingga 3.3 volt tergantung pada posisi putarannya. Tegangan ini dibaca oleh mikrokontroler melalui pin ADC (Analog-to-Digital Converter), kemudian dikonversi menjadi nilai digital.
Nilai digital hasil konversi ADC selanjutnya digunakan untuk dua keperluan:
-
Mengendalikan posisi motor servo, dengan cara mengubah nilai ADC menjadi sinyal PWM (Pulse Width Modulation). Sinyal PWM tersebut dikirimkan ke pin kontrol servo motor, yang kemudian menggerakkan poros motor sesuai dengan lebar pulsa. Semakin besar nilai ADC, semakin besar pula sudut putar motor servo.
-
Menampilkan nilai pada LCD 16x2, di mana nilai ADC atau nilai sudut servo dikirim dalam bentuk data karakter ke LCD menggunakan mode 4-bit. Hal ini memungkinkan pengguna dapat memantau secara langsung nilai yang dihasilkan dari potensiometer.
Secara keseluruhan, saat potensiometer diputar, nilai ADC akan berubah, menyebabkan perubahan posisi sudut motor servo, dan nilai tersebut juga ditampilkan secara real-time pada LCD.
4. Flowchart dan Listing Program [Kembali]

5. Video Demo [Kembali]


Download Video Demo [download]
Download Datasheet Mikrokontroler Raspberry Pi Pico [download]























{kind=link}