Percobaan 8
Motor DC, Motor Stepper, Touch Sensor, Potensiometer
1. Prosedur [Kembali]
- Siapkan alat alat yang diperlukan pada STM32
- Hubungkan setiap komponen
- Inputkan Listing Program
- Running
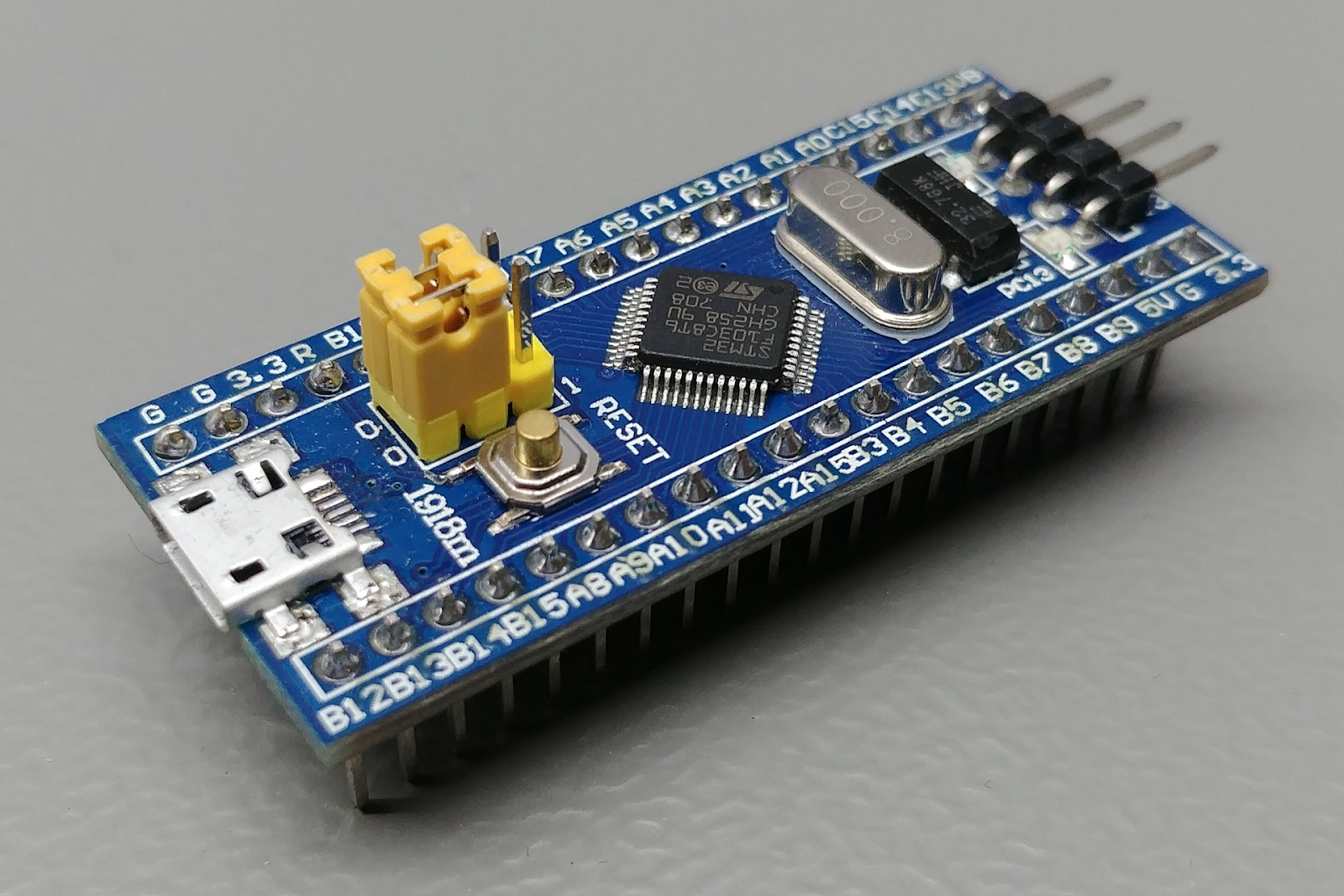
2. Hardware dan Diagram Blok [Kembali]
- STM32F103C8 – Sebagai mikrokontroler utama untuk mengendalikan sistem.

- Motor Stepper
- Driver Motor Stepper


- Motor Dc
- Potensiometer
- Touch Sensor




3. Rangkaian Simulasi dan Prinsip Kerja [Kembali]

Prinsip Kerja :
Sistem ini bekerja dengan mengandalkan sensor sentuh sebagai pemicu input digital ke mikrokontroler STM32F103C8 (board Blue Pill). Sensor ini terhubung ke salah satu pin GPIO seperti PA0 atau PA1 yang mudah diakses pada sisi kiri board, serta mendukung fungsi input digital dan fitur interrupt untuk deteksi sentuhan yang lebih efisien. Saat sensor disentuh, ia mengirimkan sinyal logika HIGH ke STM32, yang kemudian memproses sinyal tersebut sebagai perintah untuk mengaktifkan aktuator.
Sebagai otak dari sistem, STM32F103C8 menerima input dari sensor dan menghasilkan output digital melalui pin seperti PB0 hingga PB3. Pin-pin ini dipilih karena merupakan GPIO yang stabil dan umum digunakan dalam kendali digital. Output dari STM32 kemudian diarahkan ke input IC driver motor ULN2003A, yang bertugas memperkuat sinyal dan arus agar cukup kuat untuk menggerakkan motor. Fungsi ini penting karena mikrokontroler tidak mampu menyuplai arus besar secara langsung.
Driver ULN2003A menerima sinyal dari STM32 melalui pin 1B sampai 7B, dan menyalurkannya ke motor melalui pin 1C sampai 7C. Pin COM pada ULN2003A dihubungkan ke tegangan +3.3V sebagai perlindungan dari arus balik (flyback) berkat dioda internal yang dimilikinya. Penggunaan ULN2003A sangat krusial dalam sistem ini karena selain mampu menangani beban arus besar, ia juga berfungsi melindungi mikrokontroler dari potensi kerusakan.
Motor BLDC (Brushless DC) sebagai aktuator akhir dalam sistem ini mendapatkan suplai daya dari jalur +3.3V dan GND, dan dikendalikan melalui output dari ULN2003A. Motor ini tidak disuplai langsung oleh STM32 karena keterbatasan arus yang dapat disediakan oleh mikrokontroler. Dengan kata lain, ULN2003A bertindak sebagai saklar elektronik yang kuat untuk memastikan motor dapat beroperasi dengan arus yang memadai.
4. Flowchart dan Listing Program [Kembali]

5. Video Demo [Kembali]
6. Analisa [Kembali]




Download Video Demo [download]
Download Datasheet Mikrokontroler Raspberry Pi Pico [download]



0 komentar:
Posting Komentar